


Project Gallery








Lab Projects
2019 ~ 2021
During the two years I stayed in RMML, I have mainly worked on the following two projects.
I became the leader for both of the two projects during my senior year.
I was responsible for managing the schedule and leading 4 other students for both projects at the same time.
.jpg)
Tea-Harvesting Robot
ROS | Simulink | C++ | SLAM | Reeds-Shepp Curve | Trajectory planning and tracking
In this project, we developed an intelligent vehicle which can carry the tea harvesting tool and walk side-by-side with a farmer to pluck the tea collaboratively.
In addition to the collaborative features, object avoidance and path planning had been implemented to perform autonomous turning between rows of tea trees.
>> view project

Robotic arm
Matlab | 3D printing | Solidworks | Kinematics | Mechanism design | Circuit Design and Wiring
The main goal for this project is to design an robotic arm equipped with a Chlorophyll Fluorescence Imaging sensor to automatically detect the water stress within a tomato plant. Building a robot arm from scratch makes me realize details to considerate when choosing the components and deciding the motors. Also, by using Simulink to simulate the movement of the robot, I was able to gain knowledge about motion planning for manipulators.
>> view project
Internship
07 ~ 08. 2020
In my senior summer break, I decided to apply for an internship at Coretronics Corporation to enhance my abilities in the industry. Apart from the imperative coding skills I developed via constructing a path planning simulation for an autonomous forklift using C++ and QT, I also learned about the importance of business concepts in the industry.

Autonomous Forklift
Matlab | Simulink | C++ | OpenCV | path planning | System Identification
Implemented system identification using Matlab and constructed a 2D simulation for autonomous forklift using Simulink, QT, C++, and OpenCV.
In addition, I researched on Convex Elastic Smoothing algorithm and developed a Double Continuous Curvature path planning algorithm with an error less than 3%
>> view project
Course Projects
2019 ~ 2021
Delivery Robot
Visual feedback control | Python / C++ | Image processing | System integration
Using a website to specify the target ball color and the goal position color, the mobile robot will approach the target ball by using visual servo techniques. Then, the robot will carry it across the field while performing object avoidance. After approaching the goal positions, the robot will launch the ball into the goal. If the ball enters the goal successfully, the robot will send back a message
>> view project

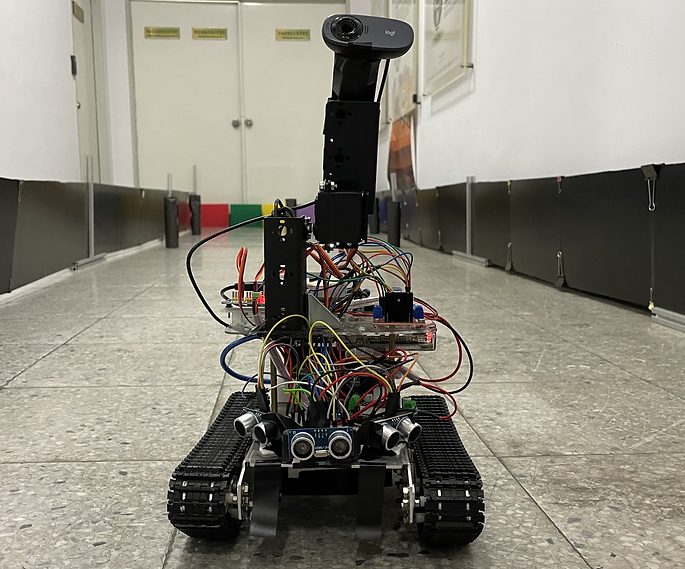
Adaptive and Neural Network control of Tracked mobile robot
Adaptive control | Neural Network control | Simulink | Online parameter estimation
To minimize the effect of the longitudinal slippage when controlling tracked mobile robots (TMR), we implemented different adaptive laws and Neural network methods to estimate the slippage parameters. Then, we use Simulink and python to construct simulation models and discuss the trajectory tracking abilities of each method.
>> view project

>> view project
Digital controller implementation for
Tracked mobile robot
System Identification | Digital controller design | Matlab | Simulink | Trajectory tracking
In this project, we use system identification to estimate the transfer function of the motor with different sampling times. Then, we used pole placement method to decide the gains for the PI controller. Finally, we implemented the digital controller on the actuator to see the results.
Hand Mimicking Robot
Convolutional Pose Machines | Computer Vision | Python / C++ | Image processing
The purpose of the project is to use computer vision to track the motion of a human hand and replicate it on a robotic hand. We used 3D printing to built an open source bio-mimetic humanoid robot to perform the motion.

>> view project
>> view project
Moon lander simulation
PID controller design | Lagrangian mechanics | Euler's Method | Matlab
This project considers the 2D soft landing problem of a moon lander. In order to stabilize the lunar lander after impact, a control law must be implemented on the AMEID of the lander. The equation for the dynamic model of the landing process of a lunar lander was derived using Lagrangian mechanics. As for the control law, a classical P control has been implemented on the AMEID for minimum control effort. The result is shown in Matlab simulation to verify the feasibility of the derived control law